Ahmed Y. Nurye
Vrije Universiteit Amsterdam
Social AI Group
De Boelelaan 1111 (NU building), 1081 HV Amsterdam

I am an incoming PhD student in Computer Science at Vrije Universiteit Amsterdam, co-advised by Kim Baraka and Herke van Hoof (University of Amsterdam). My research is centered around interactive robot learning. Specifically, I study how robots can learn from multimodal feedback at various levels of abstraction and reason about their learning needs to actively request the right type of feedback at the right time.
Previously, I was a systems engineer at Scania Group, developing algorithms for battery management systems. Before that, I obtained my MSc in Robotics from Warsaw University of Technology, where I was advised by Prof. Elżbieta Jarzębowska. Earlier, I completed my undergraduate studies in Electrical Engineering at Addis Ababa Science and Technology University in Ethiopia.
Research Interests: Human-Robot Interaction, Interactive Robot Learning, Mathematical Human Modeling, Reinforcement Learning
Email / Google Scholar / GitHub / CV
news
| Oct 01, 2025 | I joined the Social AI Group at VU Amsterdam as a PhD candidate under the guidance of Prof. Kim Baraka and Prof. Herke van Hoof (UvA) |
|---|---|
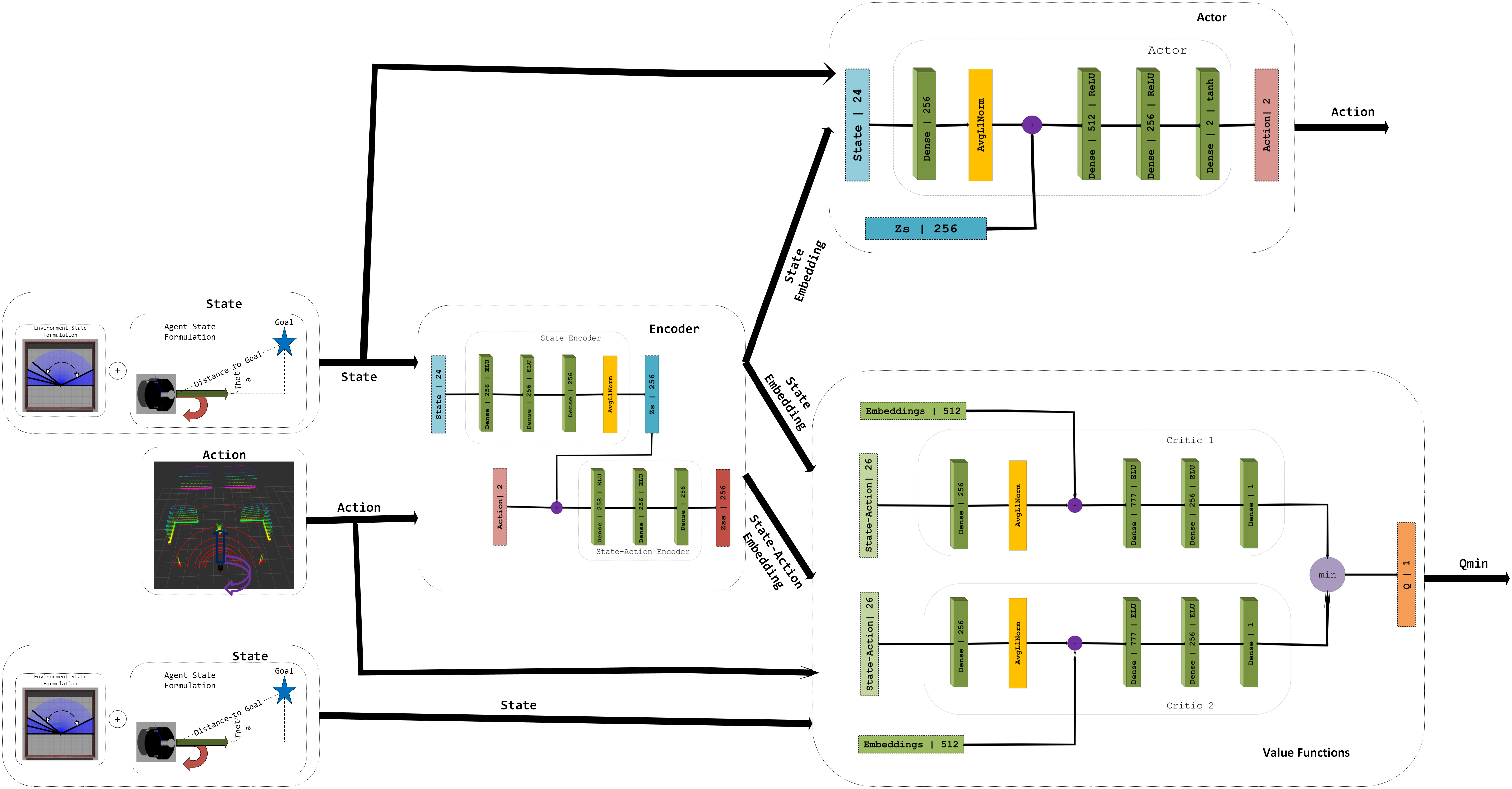
| May 19, 2025 | Our paper on deep reinforcement learning for mobile robot navigation in dynamic environments has been accepted to MMAR 2025! |
| Oct 23, 2024 | Successfully defended my master’s thesis! |
| Apr 15, 2024 | I started a new position as a systems engineer at Northvolt. |